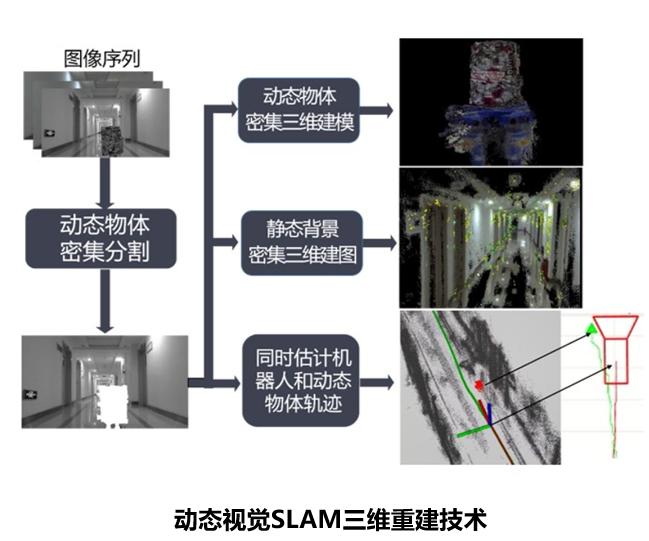
针对智能机器人领域中的热点问题——动态场景三维重建,提出基于运动分割方法的运动模型估计进行场景时序三维重建,实现3D地图和运动物体时序3D模型的同时重建。
友情链接:
版权所有: 河南省科学院空天信息研究所 地址: 河南省郑州市郑东新区崇实里228号 邮政编码: 450046 豫ICP备2023021652号-1

 友情链接:
友情链接: